







Holybro Pixhawk Durandal Autopilot Flight Controller M9N GPS Combo Set (20226)
![]()
Holybro Pixhawk Durandal Autopilot Flight Controller M9N GPS Combo Set (20226)
Overview
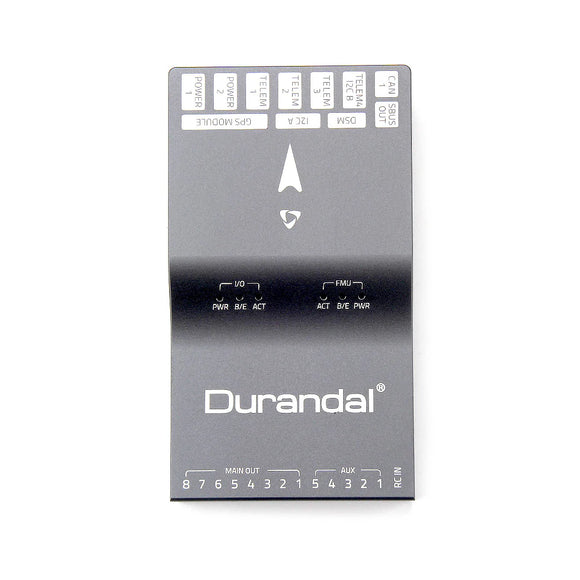
Durandal is a flight controller designed by Holybro utilizing the STM32H7 microcontroller series. It comes with built-in vibration isolation system and integrated IMU heater for sensors temperature control.
SKU 20226 Includes:
- Durandal Flight Controller
- Power Module: PM02 V3 12S (15010)
- GPS: M9N (12027)
- Cable Set (18101)

Key Design Points:
- High performance H7 Processor with clock speed up to 480 MHz
- Redundant inertial measurement unit (IMU) from Bosch® & InvenSense®
- Built-in Vibration isolation system to filter out high frequency vibration and reduce noise to ensure accurate readings
- IMUs are temperature-controlled by onboard heating resistors, allowing optimum working temperature of IMUs
- 2 power ports & 5 general purpose serial ports
- Two Power ports for redundancy
Technical Specifications
Processors & Sensors
-
Main FMU Processor: STM32H743
-
32 Bit Arm ® Cortex®-M7, 480MHz, 2MB memory, 1MB RAM
-
-
IO Processor: STM32F100/F103
-
32 Bit Arm ® Cortex®
-
-
On-board sensors
-
Accel/Gyro: ICM-20689
-
Accel/Gyro: ICM-20602 / BMI088
-
Mag: IST8310
-
Barometer: MS5611
-
Electrical Data
Voltage Ratings:
- Max input voltage: 6V
- USB Power Input: 4.75~5.25V
- Servo Rail Input: 0~36V
Current Ratings:
- Telem1 Max output current limiter: 1.5A
- All other port combined output current limiter: 1.5A
Mechanical Data:
-
Dimensions:80*45*20.5mm
-
Weight: 68.8g
INTERFACES
- 13 PWM outputs (8 from IO, 5 from FMU)
- 5 general purpose serial ports
- 3 with full flow control
- 1 with separate 1.5A current limit (Telem1)
- 3 I2C ports
- 4 SPI buses
- 1 internal high speed SPI sensor bus with 4 chip selects and 6 DRDYs
- 1 internal low noise SPI bus dedicated for XXX
- Barometer with 2 chip selects, no DRDYs
- 1 internal SPI bus dedicated for FRAM
- Supports temperature control located on sensor module
- 1 external SPI buses
- Up to 2 CANBuses for dual CAN
- Each CANBus has individual silent controls or ESC RX-MUX control
- Analog inputs for voltage / current of 2 batteries
- 6 dedicated PWM/Capture inputs on FMU
- Dedicated R/C input for Spektrum / DSM
- Dedicated R/C input for CPPM and S.Bus
- Dedicated S.Bus servo output and analog / PWM RSSI input
- 2 additional analog inputs









